Transient Response of Second-order System 2차 시스템 과도응답 | (2020-05-22) |
▷
Top
▷
전기전자공학
▷
자동제어
▷
시간 응답
▷
2차 시스템
1. 2차 시스템의 과도응답 ㅇ 여러 유형을 갖음 - 제동비(Damping Ratio) ζ에 따라 여러 과도응답 유형을 갖음ㅇ 시정수에 의존 않음 - 한편, 2차 시스템의 과도응답 특성은 시정수에 별로 의존 않고, - 주로, 상승시간,정착시간,오버슈트가 중요함 - 결국, 1차 시스템에서 만 시정수가 중요함 2. 제동비에 따른 2차시스템의 계단신호에 대한 과도응답(단위 계단 응답) 구분 ㅇ 음의 감쇠 (Negative Damping) ζ< 0 - 특성방정식 근 : (σ1,σ2>0)인 2개의 복소수 극점
ㅇ 무감쇠 응답 (Undamped) ζ= 0 - 특성방정식 근 : (±jωn)인 2개의 허수 극점 - 고유응답 특성 : c(t) = A cos(ωnt-Φ) . 무감쇠로 진동함
ㅇ 미흡 감쇠 응답 (Underdamped) 0 < ζ< 1 - 특성방정식 근 : (-σ±jωn)인 2개의 복소수 극점 - 고유응답 특성 : c(t) = A e-σtcos(ωnt-Φ) . 진동하면서 감쇠됨 . 1차 시스템에서는 나타나지 않는 오버슈트가 발생
ㅇ 임계 감쇠 응답 (Critically damped) ζ= 1 - 특성방정식 근 : (-σ)에 중첩하는 2개의 실수 극점 - 고유응답 특성 : c(t) = k1e-σt+k2te-σt . 과감쇠 및 미흡감쇠의 경계 . 오버슈트가 없으며 가장 짧은 과도응답 특성을 갖음
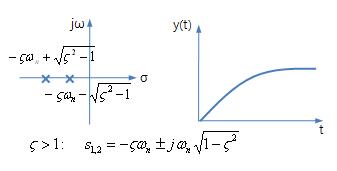
ㅇ 과도 감쇠 응답 (Overdamped) ζ> 1 - 특성방정식 근 : (-σ1,-σ2)인 2개의 실수 극점 - 고유응답 특성 : c(t) = k1e-σ₁t+k2e-σ₂t
▷
2차 시스템
1. 2차 시스템 2. 제동비 3. 고유 진동수 4. 양호도 5. 2차 시스템 과도응답 6. 2차 시스템 일반해 7. 2차 단순 폐루프 제어시스템 예 "본 웹사이트 내 모든 저작물은 원출처를 밝히는 한 자유롭게 사용(상업화포함) 가능합니다"
[정보통신기술용어해설]